Balancing Small Engines
Notes on basic principles and practical methods of procedureBasic Principles
by ET Westbury, 1951

First Principles of Balancing
The need for balancing arises by reason of the basic law of mechanics which states that "Action and reaction are equal and opposite". Any force which tends to produce motion in a body must therefore be balanced by an equal reactive force. For instance, water or air craft in moving through a fluid, must necessarily produce a reaction in the opposite direction against that fluid; motorcars or locomotives produce a backward reaction on the road or track, through their driving wheels. A revolving shaft which exerts force to drive a machine is subject to "torque reaction" which is equal and opposite at all times to its driving torque. If a piston, in an engine or pump, moves upwards, under the effect of a given force, an equal downward reaction is exerted, through the connecting-rod and crankshaft, to the bearings and foundation of the machine. This brief explanation of what reaction really means may not be necessary to the majority of readers, but it has been considered worth while in case of any possible misunderstanding of the term.Perfect balance in a machine requires that the reaction of the forces required to accelerate the working parts, or keep them moving against load, should neutralise each other in every phase of the motion, so that no reaction is ever exerted upon the bedplate of the machine. Such a machine would run steadily and without vibration at any speed, without the necessity for bolting down. It may be said that this desirable condition is rarely, if ever, obtained in practice, and one must be satisfied with the nearest approximate condition which can be obtained within the limitations of practical design.
Balancing Revolving Masses
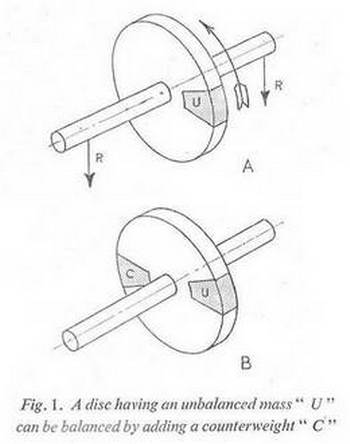 A truly symmetrical wheel of homogenous material, mounted on a true shaft and running in properly fitted bearings, produces no unbalanced forces, except for torque reaction, which is generated when it forms part of a machine used either to exert or absorb power; this is a matter with which we are not at present concerned. But it often happens that the mass of such a wheel cannot be guaranteed symmetrical, even when it is machined all over, and any lack of mass symmetry introduces an unbalanced force, the reaction of which tends to produce vibration of the frame carrying the bearings of the wheel as shown in Fig. 1A. If the unbalanced mass U is on the side of the wheel which is travelling upwards at a given time, the frame is subject to a downward reaction R-R; and at any phase in the revolution, the effect is always felt on the frame, in an opposite direction to the unbalanced force. The speed of rotation will affect the vibration caused by these reactions, which may become violent and dangerous at high speed.
A truly symmetrical wheel of homogenous material, mounted on a true shaft and running in properly fitted bearings, produces no unbalanced forces, except for torque reaction, which is generated when it forms part of a machine used either to exert or absorb power; this is a matter with which we are not at present concerned. But it often happens that the mass of such a wheel cannot be guaranteed symmetrical, even when it is machined all over, and any lack of mass symmetry introduces an unbalanced force, the reaction of which tends to produce vibration of the frame carrying the bearings of the wheel as shown in Fig. 1A. If the unbalanced mass U is on the side of the wheel which is travelling upwards at a given time, the frame is subject to a downward reaction R-R; and at any phase in the revolution, the effect is always felt on the frame, in an opposite direction to the unbalanced force. The speed of rotation will affect the vibration caused by these reactions, which may become violent and dangerous at high speed.
If the foundation of the bearings is held rigidly, it is sometimes possible to prevent vibration becoming apparent, but the forces are still there, and are exerted on the bearings of the wheel, thereby causing excessive loading. On the other hand, the frame may be resiliently mounted, so that vibrations are damped out to a certain extent between the machine and its actual foundation; but in neither case is this a complete remedy for lack of balance.
The logical and obvious thing to do in this case is to correct the bias in the mass of the wheel, either by removing metal at the heaviest point, or by adding a corresponding amount of mass at a point exactly opposite to it as in Fig. 1B. In order to locate the position of the unbalanced mass, and also to check any correction made, the wheel may be "poised", by rolling the shaft on levelled knife-edges, rollers, or very free-running bearings, and noting any tendency for it to stop in one position; the unbalanced mass will, of course, tend to run by gravity to the lowest point. This method of static balancing is often employed in practice, but where high accuracy is necessary it tends to be tedious and sometimes expensive.
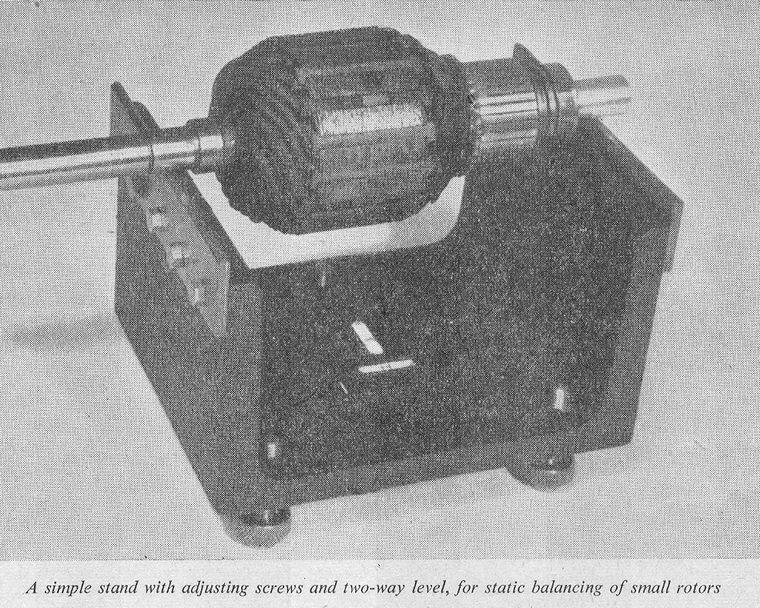 A simple stand for the static balancing of flywheels, armature, shafts, etc., is shown in the photograph. It was made from a piece of channel steel, with strips of gauge plate bolted to the upturned edges, and is provided with three levelling screws in the base, and a two-way spirit level. The strips are not finished to a sharp edge on the top surface, but are honed to a radius to avoid damaging shafts or mandrels, and must, of course, be dead straight and in parallel alignment with each other.
A simple stand for the static balancing of flywheels, armature, shafts, etc., is shown in the photograph. It was made from a piece of channel steel, with strips of gauge plate bolted to the upturned edges, and is provided with three levelling screws in the base, and a two-way spirit level. The strips are not finished to a sharp edge on the top surface, but are honed to a radius to avoid damaging shafts or mandrels, and must, of course, be dead straight and in parallel alignment with each other.
Static and Dynamic Balance
So far we have considered the case of a wheel, which approximates to a simple disc, having all its mass in or near one plane. If this is statically balanced in the way described, it will run at any speed without vibration. But in a rotating body having a fairly considerable axial length, such as a cylinder, it is important that any local unbalanced mass should be balanced out by a mass as nearly in the same cross plane as possible. The static method of balancing, in this case, is not reliable because it gives no indication of the position of the bias in relation to axial length. Thus the cylindrical rotor, an armature shaft for instance, shown in Fig. 2, may be heavy at the point A, as indicated by a static balancing test. If this unbalanced mass is counteracted by a weight applied at the point B, the rotor will appear to be in correct balance; but when running at high speed, the effect of the two unbalanced masses will cause local reactions R-R which tend to rock the shaft along its length, or in other words to set up a "couple." In practice, the effect of this may be worse than that of a single unbalanced force which tends to vibrate the structure bodily, and it is often much more difficult to detect and correct.
The static method of balancing, in this case, is not reliable because it gives no indication of the position of the bias in relation to axial length. Thus the cylindrical rotor, an armature shaft for instance, shown in Fig. 2, may be heavy at the point A, as indicated by a static balancing test. If this unbalanced mass is counteracted by a weight applied at the point B, the rotor will appear to be in correct balance; but when running at high speed, the effect of the two unbalanced masses will cause local reactions R-R which tend to rock the shaft along its length, or in other words to set up a "couple." In practice, the effect of this may be worse than that of a single unbalanced force which tends to vibrate the structure bodily, and it is often much more difficult to detect and correct.

The method usually employed for dynamic balancing is to mount the shaft in bearings on a frame which is resiliently mounted, usually by some form of spring suspension, so that it is capable of being displaced in any plane by the effect of unbalanced forces. Means are provided for locking the frame while the shaft is run up to a fair speed by any convenient means, after which it is released and allowed to vibrate or oscillate under the effect of the unbalanced forces. In modern dynamic balancing machines, indicating or recording devices are provided to show the position and extent of the unbalanced masses. While it would not be impossible to construct a simple dynamic balancing rig in the home workshop, most of the problems involved in small machines can be dealt with by careful consideration of design, and accuracy in construction of moving parts. It may be mentioned that even the balancing machine, unless of very complex design, may leave certain important considerations out of account.
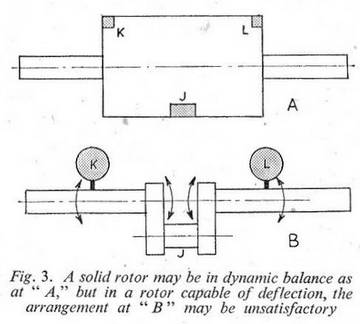 For instance, suppose that a rotor having an unbalanced mass at J (Fig. 3A) is balanced by adding two smaller masses at the points K, L. The rotor is then in correct dynamic balance, and in the case of a fairly rigid component, such as an armature, it will be perfectly satisfactory in practice. But suppose the same principle is applied to a non-rigid component, such as a crankshaft; in this case, the cancelling masses, being in different planes, exert bending stresses on the shaft, and the latter may be deflected, thereby altering the moment of the masses and putting the system out of balance (Fig. 3B).
For instance, suppose that a rotor having an unbalanced mass at J (Fig. 3A) is balanced by adding two smaller masses at the points K, L. The rotor is then in correct dynamic balance, and in the case of a fairly rigid component, such as an armature, it will be perfectly satisfactory in practice. But suppose the same principle is applied to a non-rigid component, such as a crankshaft; in this case, the cancelling masses, being in different planes, exert bending stresses on the shaft, and the latter may be deflected, thereby altering the moment of the masses and putting the system out of balance (Fig. 3B).
 This is only one of the many pitfalls in practical balancing, which cause the designer many headaches, and are rarely capable of being dealt with by theoretical calculation. Another example occurs in the case of a rotating body which for practical reasons cannot be made symmetrical in shape, though the moments of mass are calculated and counterweights added where necessary to cancel out and give correct balance as in Fig. 4. When running at high speed, however, the effect of centrifugal forc,e causes the flywheel to distort, and thereby displace the masses to a varying extent, thereby unbalancing them. In case readers think this is an unlikely eventuality, I may say that I once worked on a certain type of flywheel magneto which gave a great deal of trouble through this cause, though dynamic balancing tests gave no indication of the source of error.
This is only one of the many pitfalls in practical balancing, which cause the designer many headaches, and are rarely capable of being dealt with by theoretical calculation. Another example occurs in the case of a rotating body which for practical reasons cannot be made symmetrical in shape, though the moments of mass are calculated and counterweights added where necessary to cancel out and give correct balance as in Fig. 4. When running at high speed, however, the effect of centrifugal forc,e causes the flywheel to distort, and thereby displace the masses to a varying extent, thereby unbalancing them. In case readers think this is an unlikely eventuality, I may say that I once worked on a certain type of flywheel magneto which gave a great deal of trouble through this cause, though dynamic balancing tests gave no indication of the source of error.
Balance weights, whatever their type or purpose, should always be located as close to the plane of the unbalanced mass as possible. Thus, in the case of the crankshaft shown in Fig. 3B, it would be better to attach the counterweights to the crank webs than at the points indicated. The practice of fitting balance weights to external flywheels, therefore, is one that cannot be commended; in the case of an overhung crankshaft, any bias in the flywheel would set up a violent rocking couple. Flywheels should always be at least in static balance, and if of any great width, dynamic balancing is desirable. An exception is made in the case of internal flywheels, as in motor-cycle engines, which are close to the crankpins, and usually form the crank webs.
Balance of Reciprocating Masses
We have seen that an unbalanced rotating mass may be cancelled by an equal and opposite rotating mass; in a similar way, an unbalanced reciprocating mass may be cancelled by an equal and opposite reciprocating mass. It is essential that this axiom should be clearly understood; it is no use attempting to balance completely a reciprocating mass by a rotating counterweight, or vice versa. A reciprocating mass can only be balanced by an equivalent mass moving in the same plane, but in exactly opposite phase. Thus it happens that the most popular type of small engine, having a single piston working on a single crank throw, cannot possibly be perfectly balanced; the best that can be done in practice is to use a rotating counterweight to produce a partial state of balance, which may be more or less satisfactory, but can never eliminate, vibration or abnormal mechanical stresses completely.This rule applies, whether the engine is single or double-acting, and whatever method is employed to convert the reciprocating motion of the piston to rotary motion of the crankshaft. I emphasise this point because I am often asked to prescribe a "perfect" balancing formula for a single-cylinder engine, and some fearfully and wonderfully conceived devices--all of them either futile, or too complex for practical application--have been submitted by designers as a solution to this problem.

This page designed to look best when using anything but IE!
Please submit all questions and comments to
enquiries@modelenginenews.org